LED Reference
Spark MAX
| Mode | Color and Pattern |
|---|---|
| Brake (No Signal) | Cyan Blink |
| Brake (Valid Signal) | Cyan Solid |
| Coast (No Signal) | Magenta Blink |
| Coast (Valid Signal) | Magenta Solid |
| Partial Forward | Green Blink |
| Full Forward | Green Solid |
| Partial Reverse | Red Blink |
| Full Reverse | Red Solid |
| Forward Limit | Green/White Blink |
| Reverse Limit | Red/White Blink |
CANCoder
Green light = good. No green light = bad.
LaserCAN
- Orange: The orange LED should blink rapidly for 2-3 seconds before turning off. If orange LED remains on, upgrade firmware.
- Green: Fully on
- Yellow: Identifying configuration
Robot Signal Light (RSL)
The RSL state matches the RSL LED on the RoboRIO when operating normally.
- Solid Orange: Robot on, disabled
- Blinking Orange: Robot on, enabled
- Off: Robot off
RoboRIO
| LED | Color/Pattern | Inference |
|---|---|---|
| Power | Green | Power is good |
| Power | Amber | Brownout protection tripped, outputs disabled |
| Power | Red | Power fault, check user rails for short circuit |
| Status | 2 blinks | Software error, reimage roboRIO |
| Status | 3 blinks | Safe Mode, restart roboRIO, reimage if not resolved |
| Status | 4 blinks | Software crashed twice without rebooting, restart roboRIO, reimage if not resolved |
| Status | Constant flash or Solid | Unrecoverable error |
| Radio | Not currently implemented | |
| Comm | Off | No Communication |
| Comm | Red Solid | Communication with DS, but no user code running |
| Comm | Red Blinking | E-Stop triggered |
| Comm | Green Solid | Good communication with DS |
| Mode | Off | Outputs disabled (robot in disabled mode, brownout, etc) |
| Mode | Orange | Autonomous enabled |
| Mode | Green | Teleop enabled |
| Mode | Red | Test enabled |
Limelight
- Green: The green status light will blink slowly if no targets are detected by the current pipeline. It will blink quickly if any targets are detected by the current pipeline.
- Yellow: The yellow status light will blink when a static IP address has not been assigned. If a static IP address is assigned, the light will remain either consistently on or off, without any blinking.
PDH
| Color/Pattern | Status |
|---|---|
| Blue Solid | Device on but no communication established |
| Green Solid | Main communication with roboRIO established |
| Magenta Blinking | Keep-alive timeout |
| Cyan Solid | Secondary Heartbeat (Connected to REV Hardware Client) |
| Orange/Blue Blinking | Low Battery |
| Orange/Yellow Blinking | CAN Fault |
| Orange/Cyan Blinking | Hardware Fault |
| Orange/Red Blinking | Failsafe |
| Orange/Magenta Blinking | Device Overcurrent |
VRM
- 5V/500mA Status LED
- ON when 5V channels are powered
- OFF when breaker has tripped
- 12V/500mA Status LED
- ON when 12V channels are powered
- OFF when breaker has tripped
Blinkin
- Blinking blue means that no input PWM active
- Yellow means it entered set up mode. It will turn back to blue after setup mode is exited
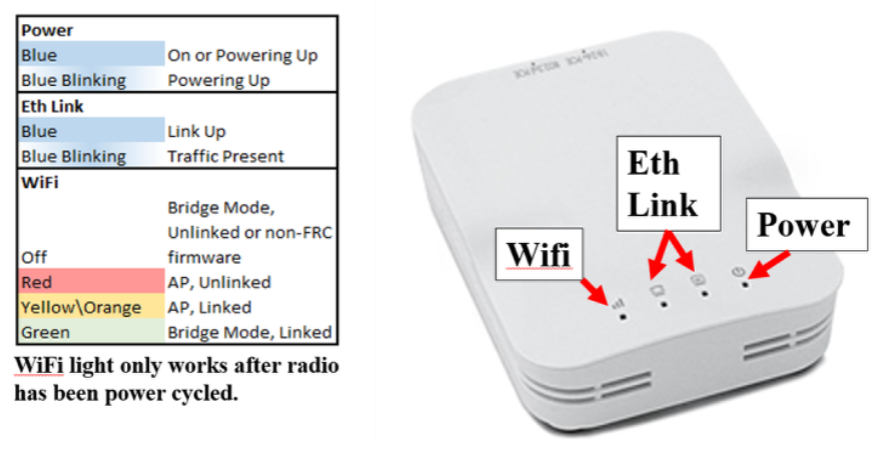
Radio